Semantically Assisted Loop Closure in SLAM Using NDT Histograms
Anestis Zaganidis
Alexandros Zerntev
Tom Duckett
Grzegorz Cielniak
Lincoln Centre For Autonomous Systems, University of Lincoln, UK
The proposed pipeline
- Point cloud registration: SE-NDT1
- Semantic segmentation: PointNet++2
- Map structure: modified Submap per Perspective (SuPer) NDT OM3
- Loop detection: Semantically assisted NDT Histograms
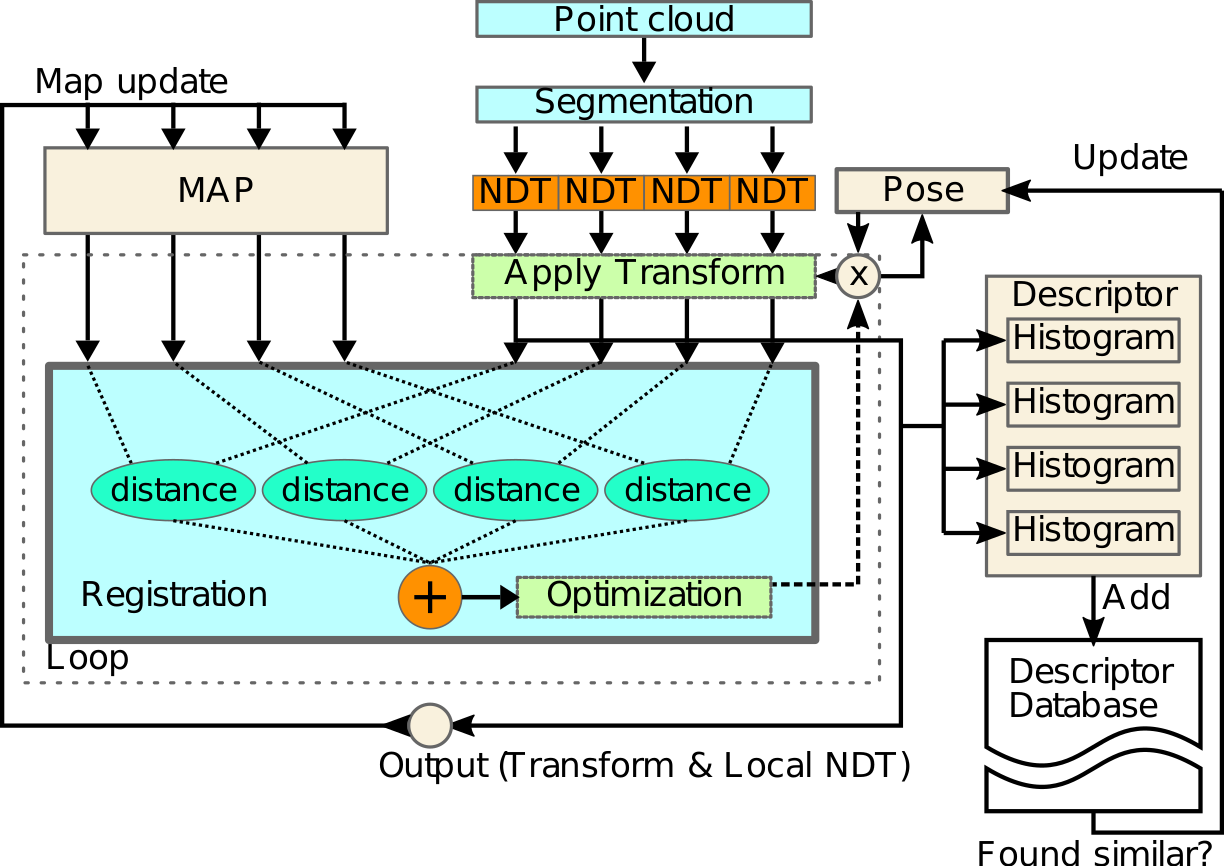
Point cloud registration
Semantic assisted Normal Distributions Transform
Distributions instead of points
NDT per segment
Correspondences only between components of the same class
Semantic Segmentation
PointNet++
Original SE-NDT used PointNet
Hierarchical processing of the cloud. Division into blocks. x10 times faster
Trained to recognize 8 classes, Semantic3d.net
Loop closure detection
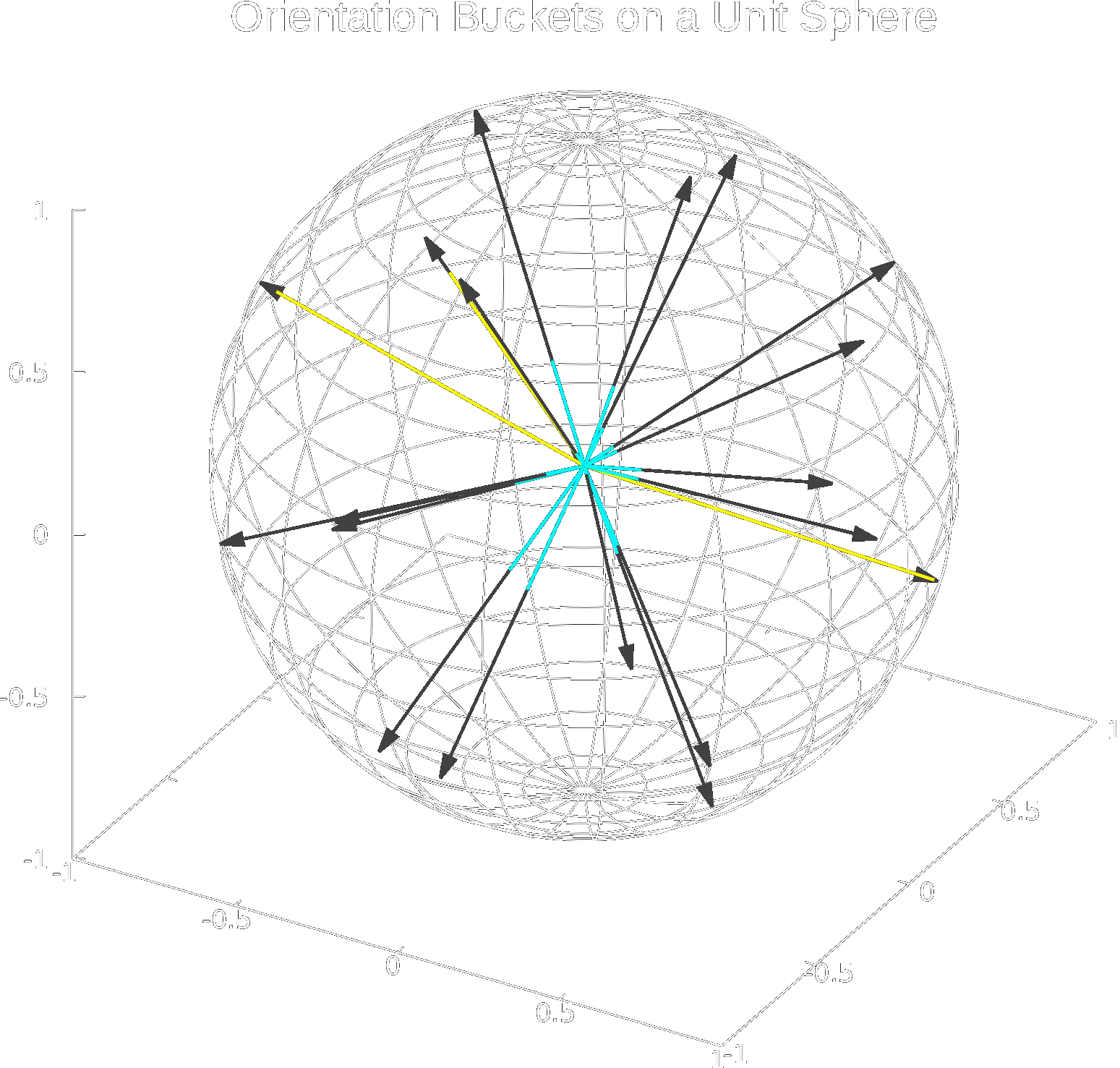
NDT Histograms
Histogram of component shapes.
- Linear
- Planar
- Spherical
Planar are binned further by direction. Golden ratio spiral sphere coverage. Spherical by distance.
All binned also by range.
Loop closure detection
NDT Histogram Similarity measure
n dominant directions per descriptor $\mathcal D_1=\{\mathbf d^1_1...\mathbf d^1_n\}$ and $\mathcal D_2=\{\mathbf d^2_1...\mathbf d^2_n\}$
for all permutations between pairs of the sets $\mathbf d^1_a,\mathbf d^1_b$ and $\mathbf d^2_c,\mathbf d^2_d$ align $\mathbf d^1_a\times\mathbf d^1_b$ to $\mathbf d^2_c\times\mathbf d^2_d$ (closed form)
Similarity: the minimum of $\|T(\mathbf h_1,\mathbf R)-\mathbf h_2\|_2$
Thresholded to recognise loop
Semantically assisted NDT Histograms
Extended by 1 dimension.
Total number: $N_{classes}*N_{ranges}*(N_{spherical}+N_{planar}+1)$
Alignment with the same method.
Similarity measure: Kullback-Leibler divergence (P map descriptor, Q local descriptor
\[D_{KL}(P\| Q)=-\sum_{x \in \mathcal X}P(x)log\left(\frac{Q(x)}{P(x)}\right)\]Semantically assisted NDT Histograms
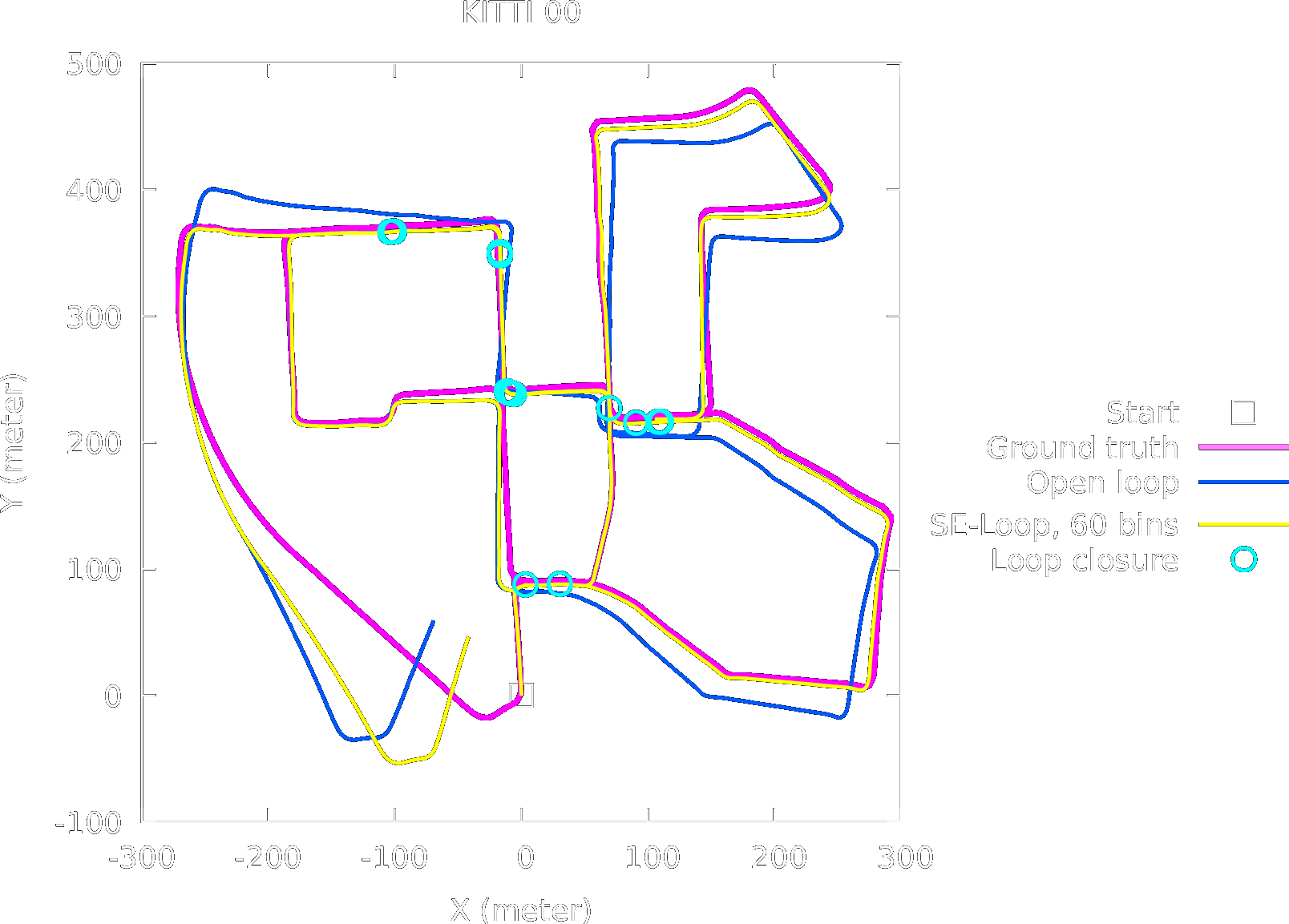
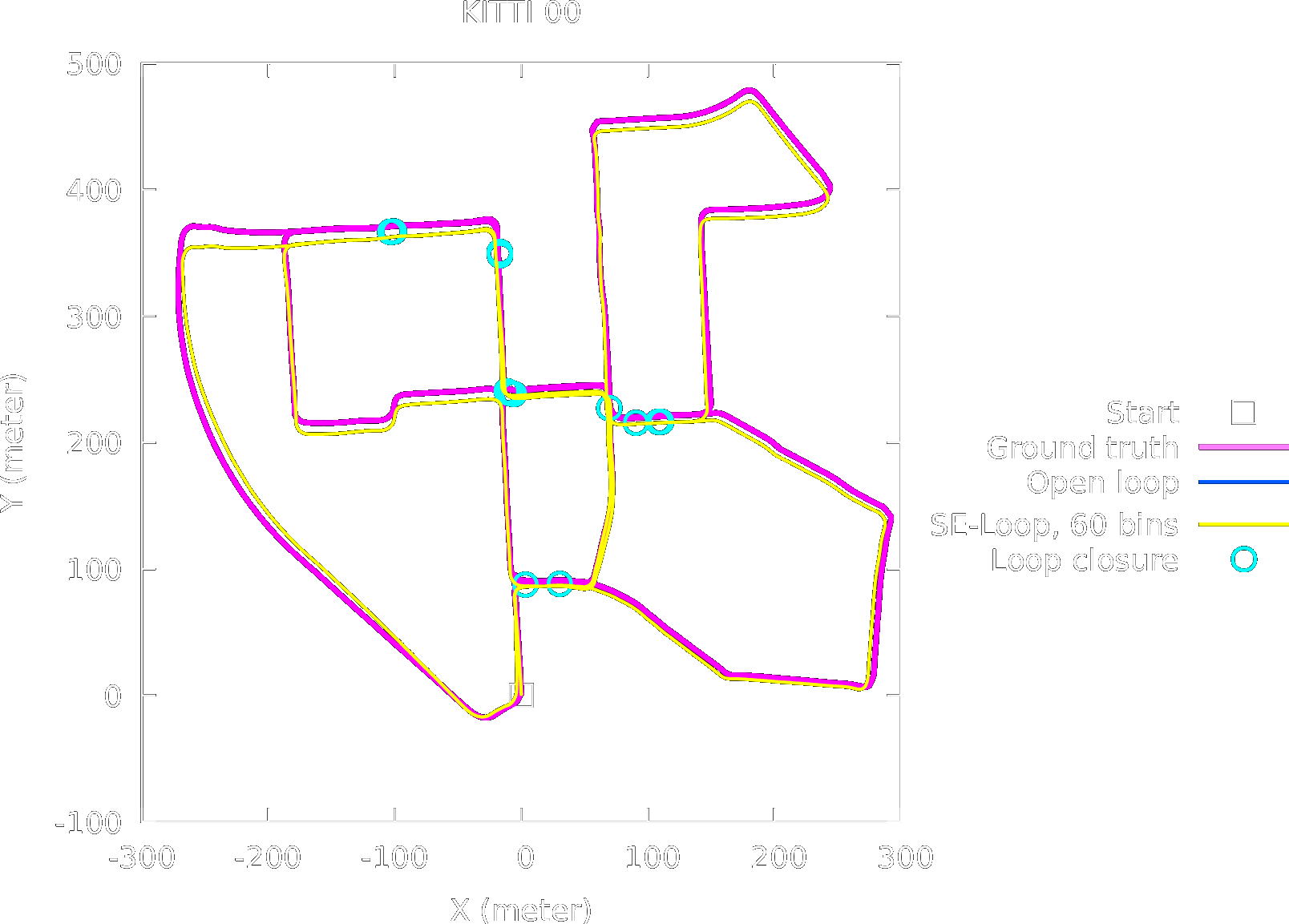
Decriptor Results (KITTI 00)
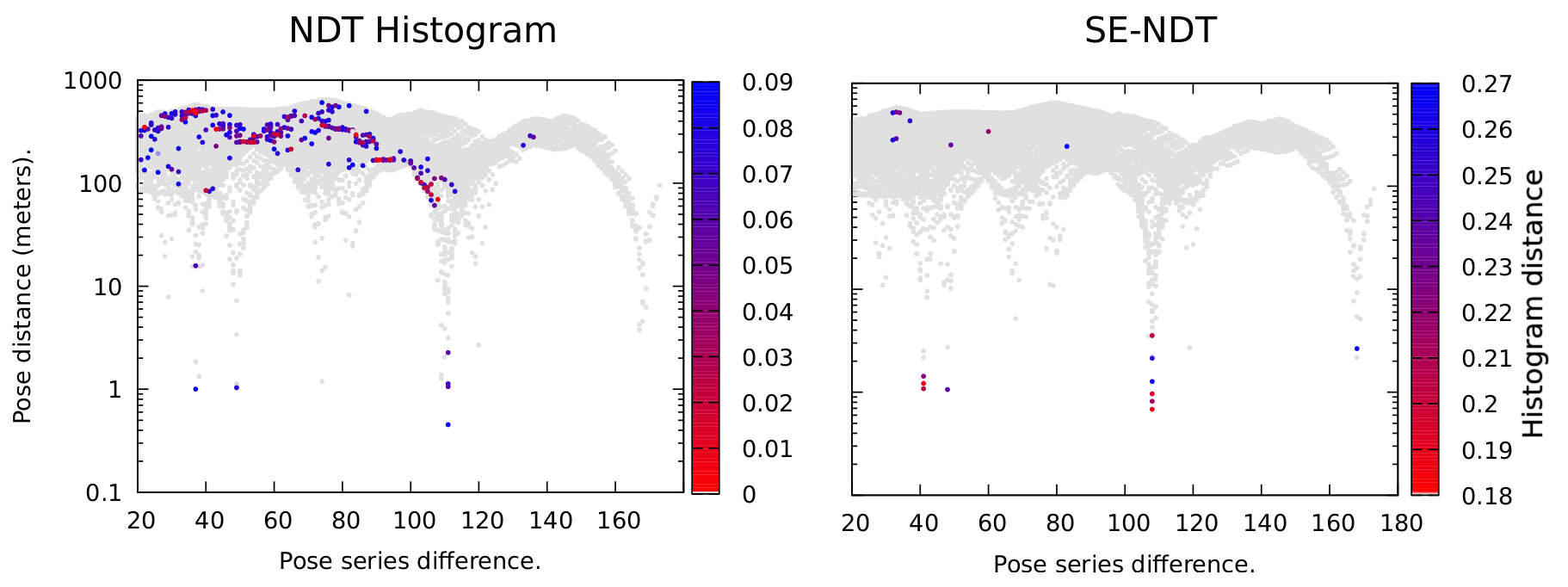
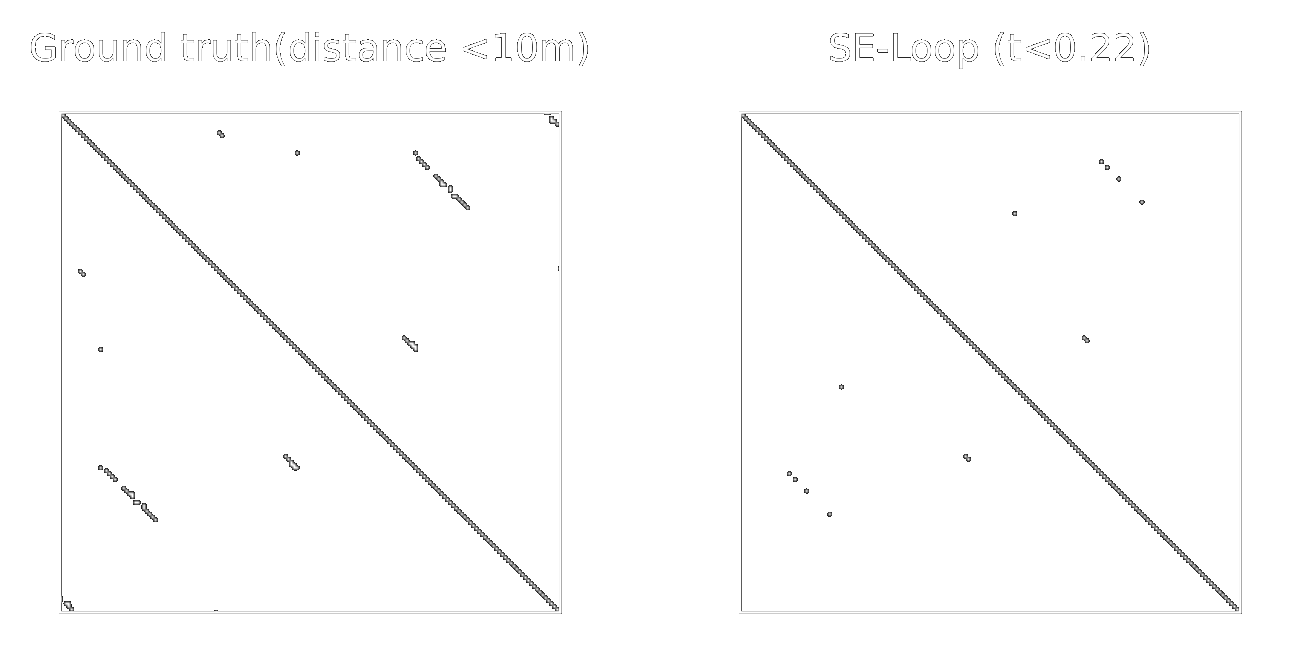
Semantically assisted NDT Histograms
Similarity matrix (KITTI 00)
Map representation
Scrolling Submap per Perspective NDT-OM
- Graph based map.
- Cells associated with the first node that they were visible.
- Cells continuously updated (occupancy+covariance).
- Unloaded and stored when no longer in range.
- Reloaded only for loop closure validation.
- Nodes: poses where the place descriptor entropy is a local minima.
- Range of search from accumulated pose uncertainty.
System validation
Realtime, low memory, ROS integration